Biography
I am currently a fourth-year undergraduate at the SUSTech ![]() , majoring in Computer Science and Technology.
, majoring in Computer Science and Technology.
I spent a wonderful summer at Harvard University ![]() as a visiting research intern, where I had the privilege of working with Prof. Fangneng Zhan and Prof. Hanspeter Pfister. Prior to that, I worked with Prof. Yao Mu.
as a visiting research intern, where I had the privilege of working with Prof. Fangneng Zhan and Prof. Hanspeter Pfister. Prior to that, I worked with Prof. Yao Mu.
I have also gained industry experience through an internship at Xiaomi ![]() during undergraduate life.
during undergraduate life.
My research interests span computer vision and robotics, with a particular focus on simulation and 3D vision.
I’m happy to discuss any collaboration. Don’t hesitate to contact me.
Selected Publications

AREA3D: Active Reconstruction Agent with Unified Feed-Forward 3D Perception and Vision-Language Guidance
Tianling Xu, Shengzhe Gan, Leslie Gu, Yuelei Li, Fangneng Zhan, Hanspeter Pfister
- We propose AREA3D, an active reconstruction agent that leverages feed-forward 3D reconstruction models and vision-language guidance.
Full Publication List
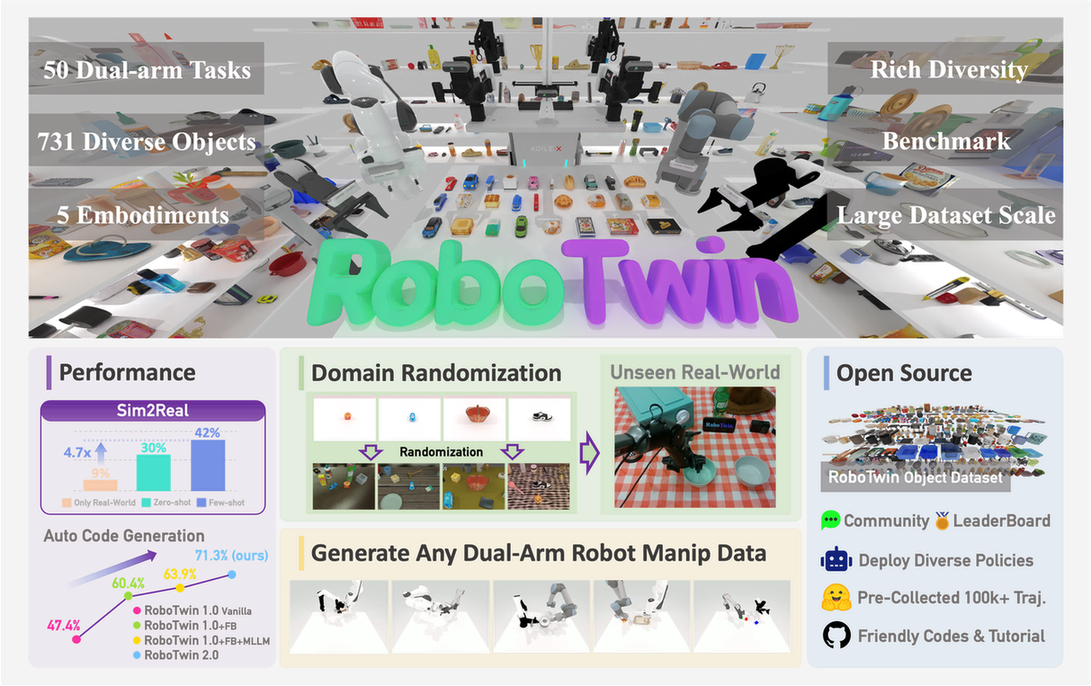
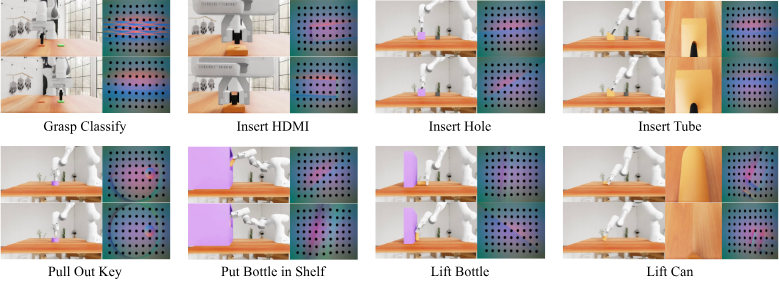
RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Randomization for Robust Bimanual Robotic Manipulation
- We present RoboTwin 2.0, a scalable framework for automated, large-scale generation of diverse and realistic data, together with unified evaluation protocols for dual-arm manipulation.
UniVTAC: A Unified Simulation Platform for Visuo-Tactile Manipulation Data Generation, Learning, and Benchmarking
Baijun Chen*, Weijie Wan*, Tianxing Chen*, Xianda Guo*, Congsheng Xu, Yuanyang Qi, Haojie Zhang, Longyan Wu, Tianling Xu, Zixuan Li, Yizhe Wu, Rui Li, Xiaokang Yang, Ping Luo, Wei Sui† , and Yao Mu†
- We propose UniVTAC, a simulation-based visuo-tactile data synthesis platform that supports three commonly used visuo-tactile sensors and enables scalable and controllable generation of informative contact interactions.
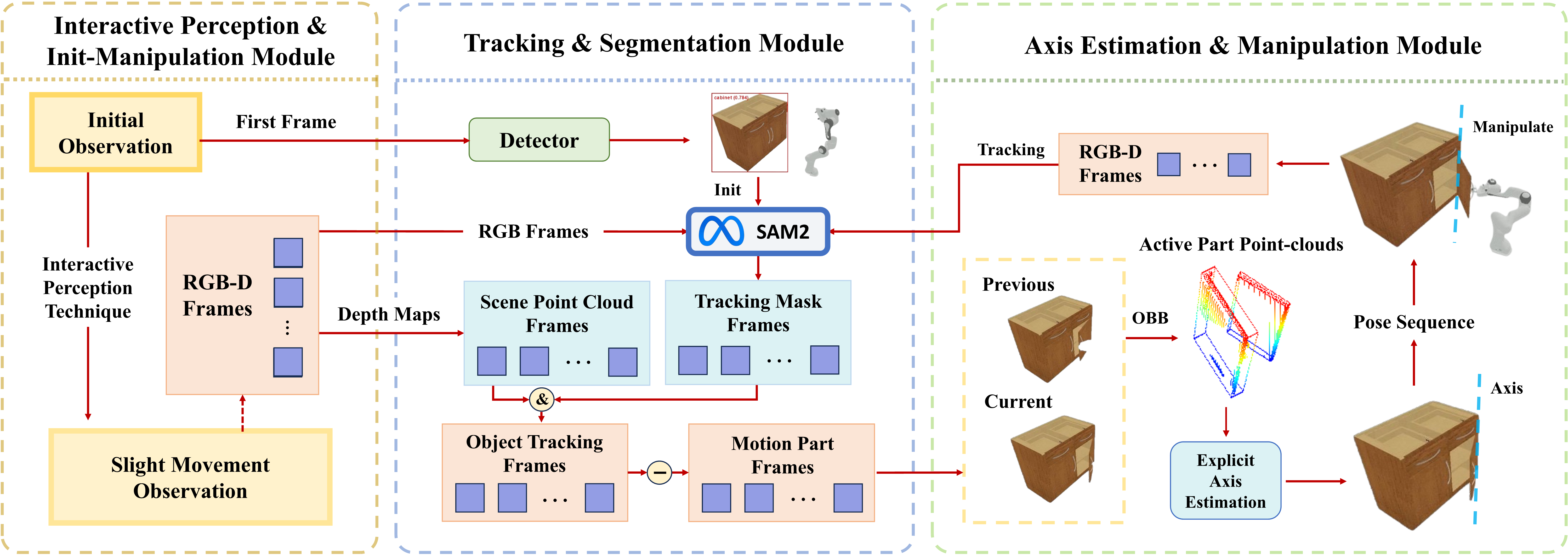
Articulated Object Manipulation using Online Axis Estimation with SAM2-Based Tracking
Xi Wang*, Tianxing Chen*, Qiaojun Yu*, Tianling Xu, Zanxin Chen, Yiting Fu, Cewu Lu†, Yao Mu†, Ping Luo†
- We present a closed-loop pipeline integrating interactive perception with online axis estimation from segmented 3D point clouds.
Work Experience
- 2025.11 – 2025.12 Xiaomi — Algorithm Engineer Intern
- 2025.06 – 2025.11 Harvard University — Visiting Research Intern
- 2024.09 – 2025.06 The University of Hong Kong — Research Assistant